This document introduces commonly used parameters when tuning motor parameters and explains how these parameters impact performance.
¶ 1. Overview of Common Parameters
The main parameters discussed are:
- Electrical Gain
- Inertia Value
- Moving Average Filter
- Speed Observer Bandwidth
- Mechanical Gain
¶ 2. Parameter Descriptions
¶ 2.1 Electrical Gain
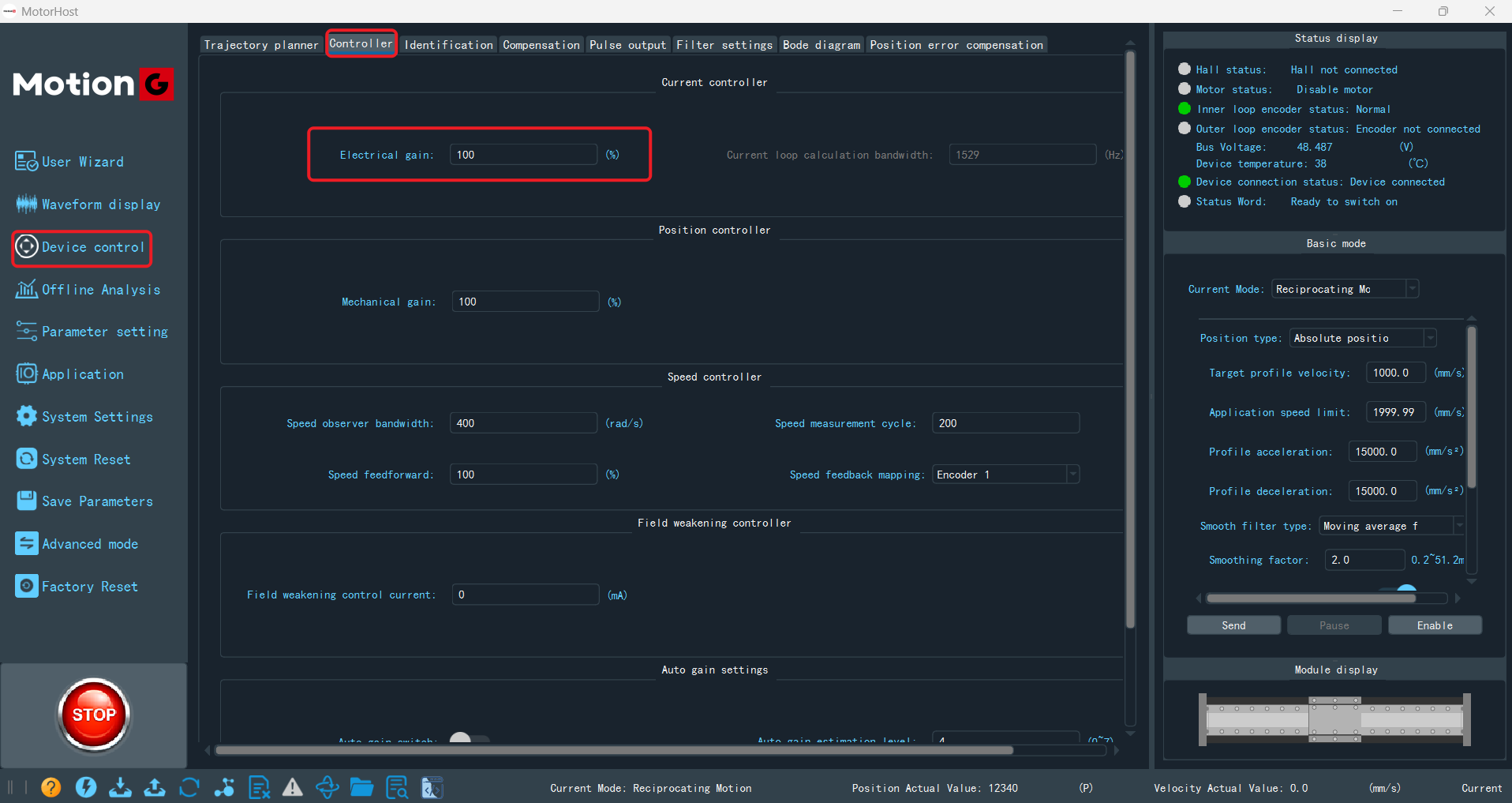
Meaning: The higher the gain, the faster the current response, with greater overshoot and more current noise.
The default electrical gain value is 100%, and the typical adjustment range is 10% to 200%. A higher gain increases the bandwidth of the current loop, improving current tracking performance. However, if set too high, it may lead to electromagnetic noise.
¶ 2.2 Inertia Value Setting
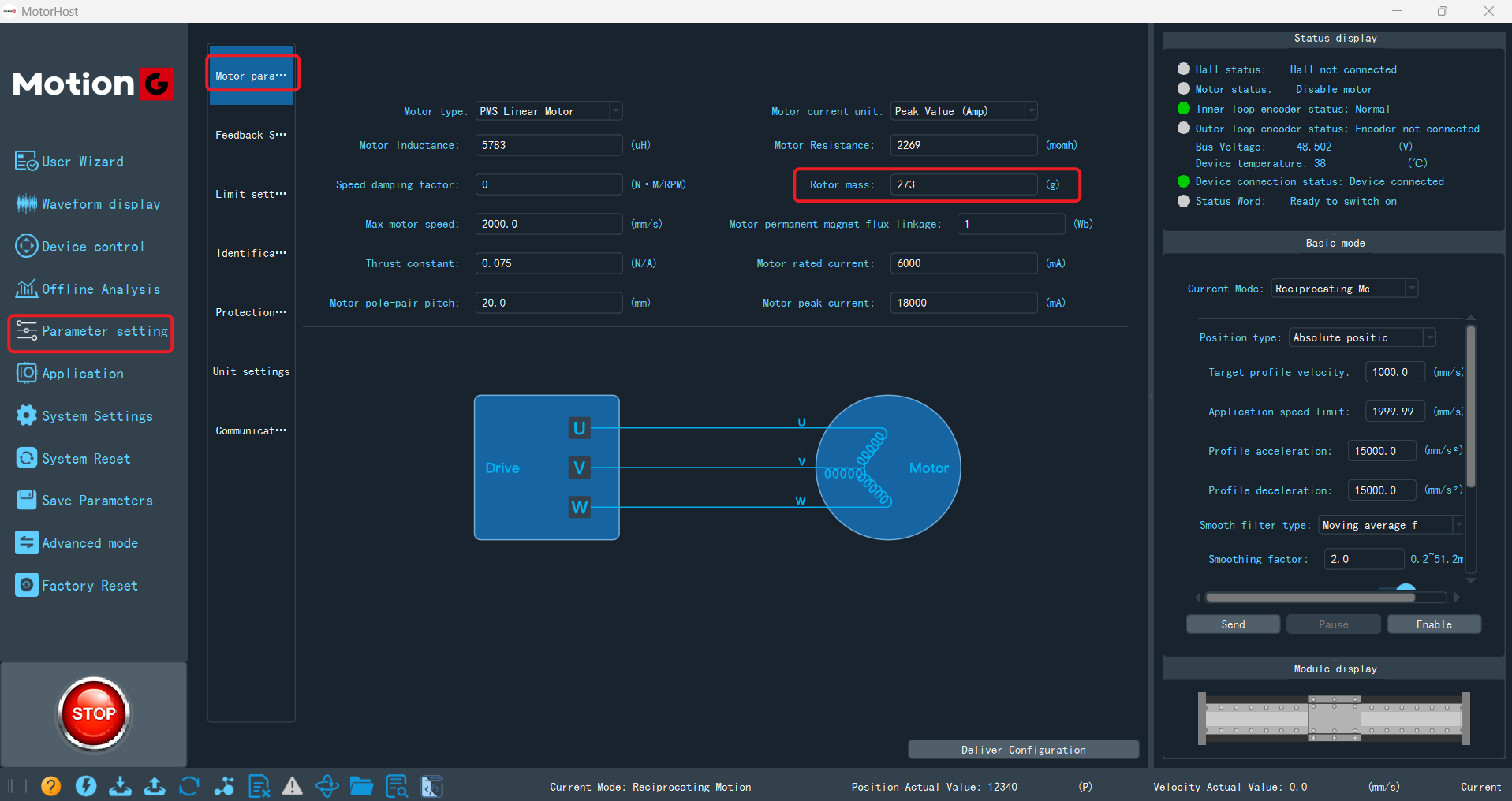
Inertia values are generally obtained through one-click identification.
If the inertia is set much smaller than the actual value, the system may experience low-frequency oscillation, loss of position control, and errors such as excessive follow-up deviation or speed runaway.
If the inertia is set too large, typically 7-8 times greater than the actual value, it can cause high-frequency vibration and noise in the motor, leading to overheating in the motor and driver, and significant current fluctuation.
¶ 2.3 Moving Average Filter
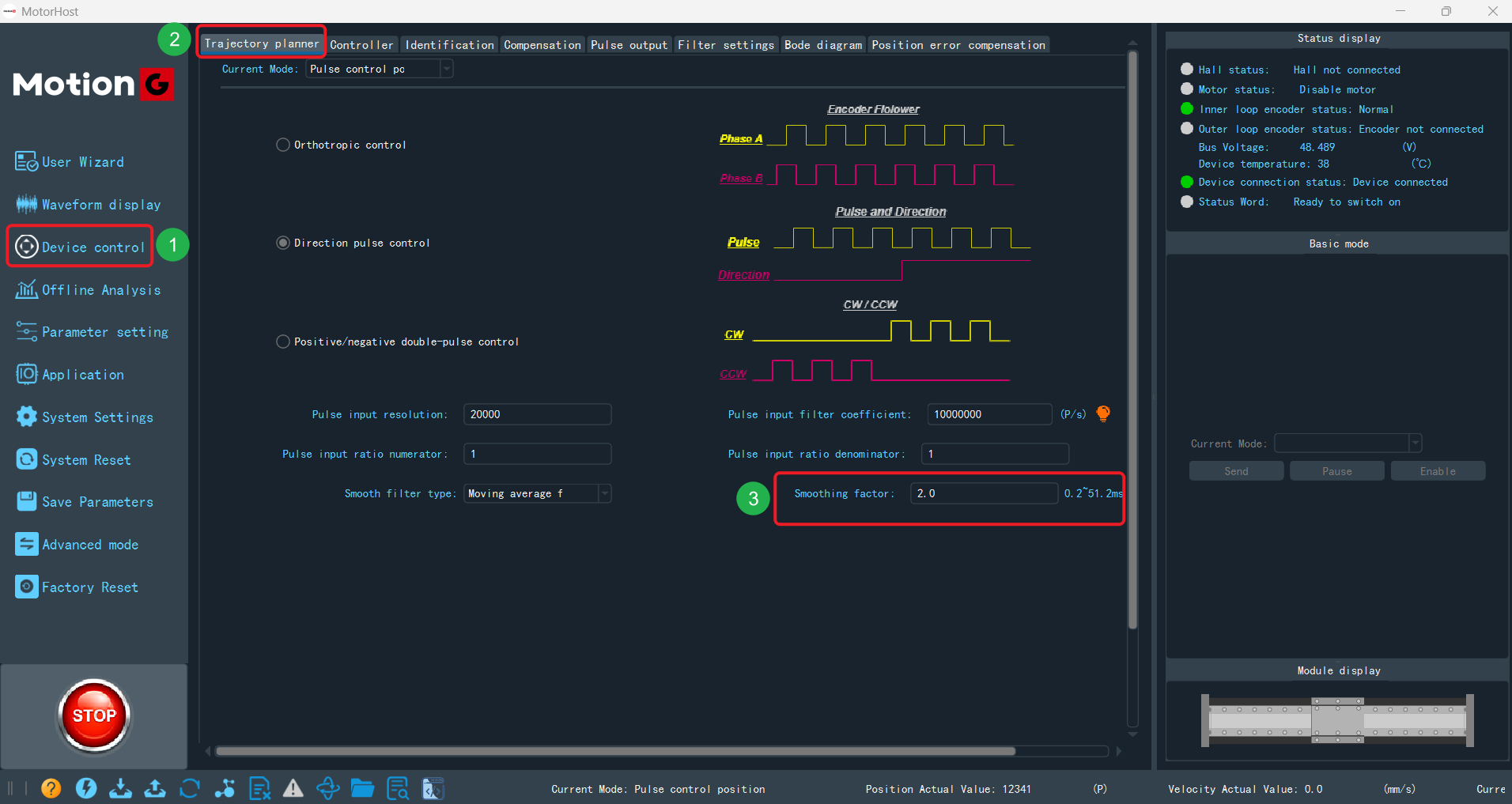
Smoothing Factor Range: 0.2–51.2 ms
Parameter Explanation:
- The smoothing factor represents the time delay (in milliseconds) for the commanded position to reach the target after the acceleration is smoothed from point to point.
- A larger smoothing factor results in smoother acceleration and reduced settling time, but it increases the overall planning time.
¶ 2.4 Speed Observer Bandwidth
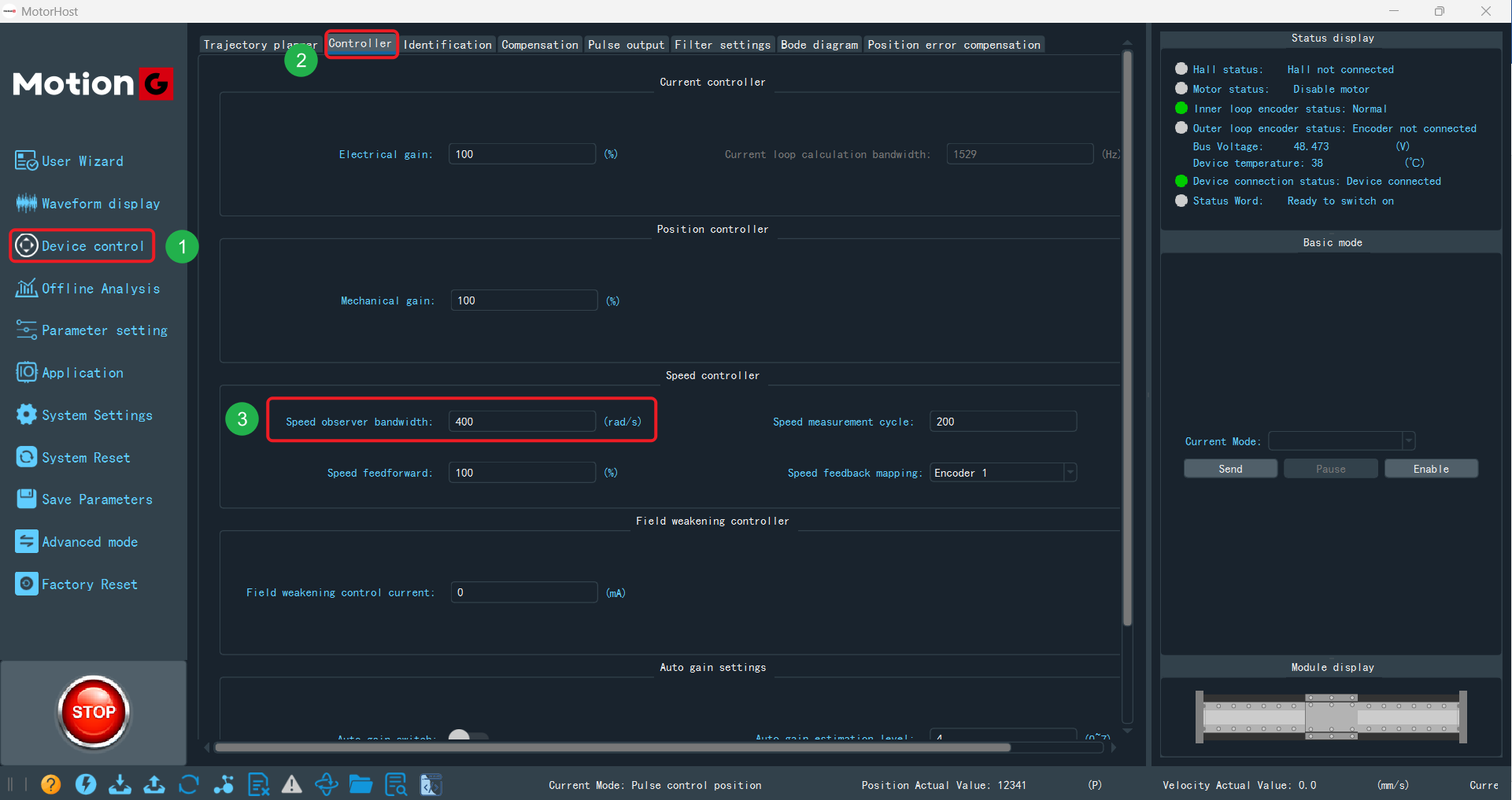
The higher the bandwidth, the faster the speed control response and the better the real-time speed measurement. However, excessive bandwidth can lead to high-frequency noise, increased speed fluctuation, and position oscillation. The typical adjustment range is 100–1200 rad/s.
Below is a comparison of the impact of different speed observer bandwidths on system rigidity under the same external load torque disturbance.
- Higher bandwidth improves the system's ability to resist disturbances and increases rigidity, but setting it too high may cause high-frequency vibration.
- Lower bandwidth corresponds to a lower cutoff frequency for speed measurement filtering, which increases the filter coefficient, resulting in slower speed control response and lower rigidity.
¶ 2.5 Mechanical Gain
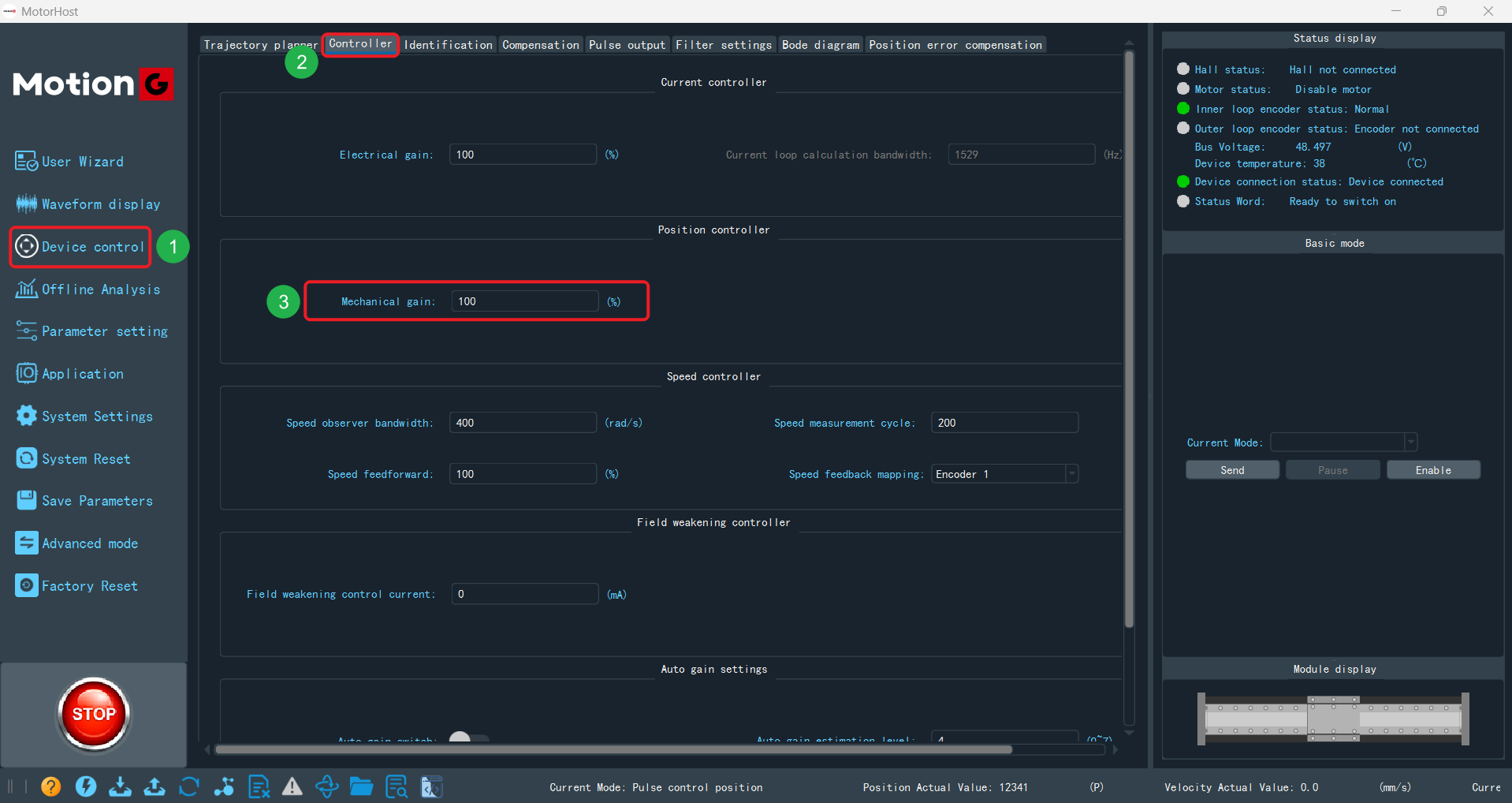
The default mechanical gain is 100%, and we generally adjust it within the range of 1% to 900%. Higher mechanical gain improves control rigidity and dynamic position tracking performance, reducing settling time. However, excessively high gain may lead to high-frequency vibration and noise.